模拟二轴拇指操纵杆(俗称摇杆)是一种模拟操纵杆,相比于「方向」操纵杆更加准确和灵敏,它带有一个「按下选择按钮」。因为它是模拟的,所以需要使用 Arduino Uno 上支持模拟输入的引脚来读取,下面我们选择的是 A0 和 A1。分别来读取 X 和 Y。而按钮按下状态可使用数字引脚 3 来读取。
材料准备
Arduino开发板
摇杆模块
杜邦线
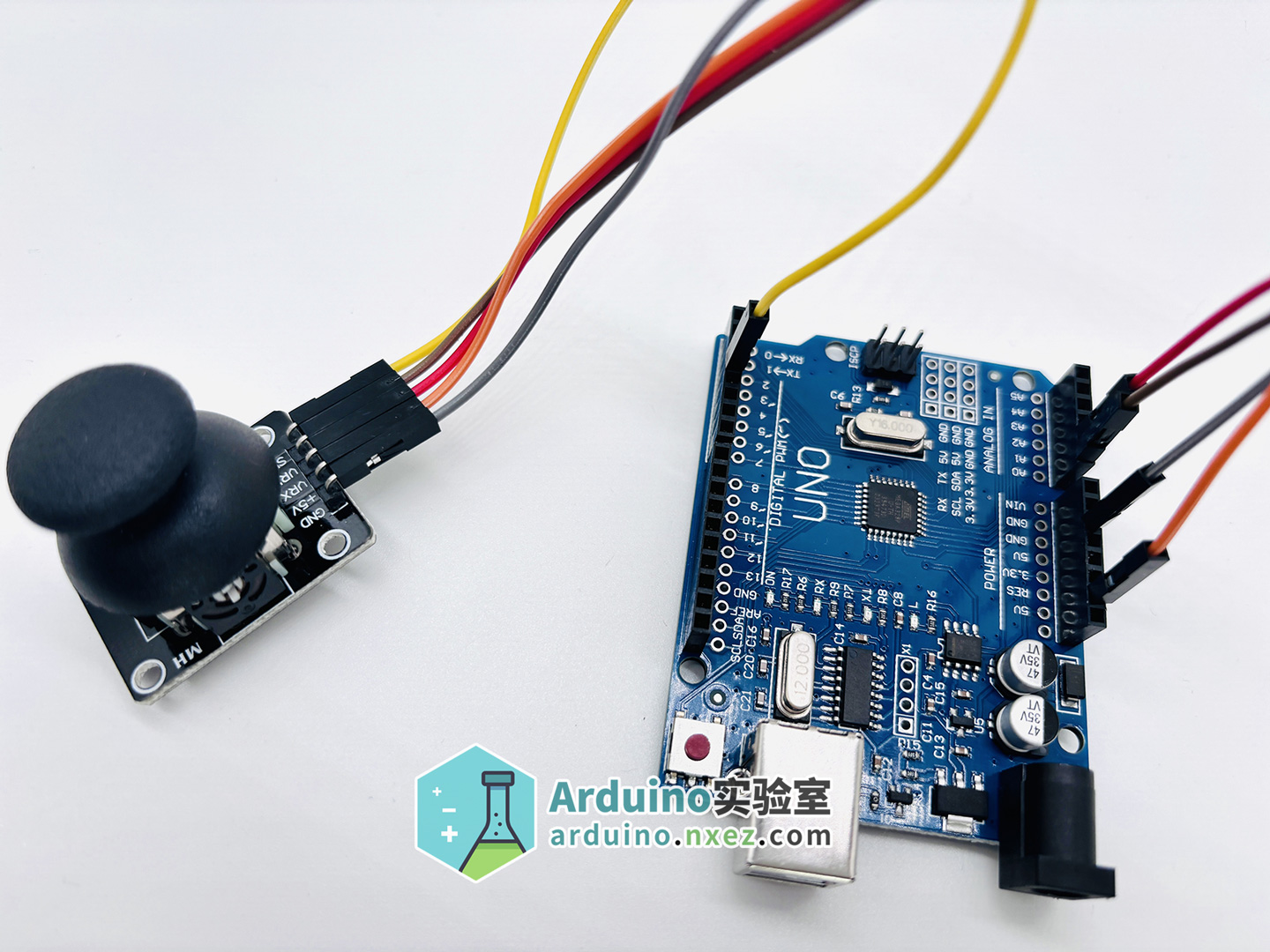
连接电路
将摇杆模块的X轴的模拟输出(VRX)连接到 Arduino 的模拟输入引脚(例如 A1)。
将摇杆模块的Y轴的模拟输出(VRY)连接到 Arduino 的模拟输入引脚(例如 A0)。
将摇杆模块的Z轴的数字输出(SW)连接到 Arduino 的数字输入引脚(例如 D3)。
将摇杆模块的电源正极(VCC)连接到 Arduino 的 5V 引脚。
将摇杆模块的电源负极(GND)连接到 Arduino 的 GND 引脚。
编写代码
打开 Arduino IDE 软件。
创建一个新的空白项目。
在项目中编写以下代码:
int JoyStick_X = A1; // X轴连接到A1引脚
int JoyStick_Y = A0; // Y轴连接到A0引脚
int JoyStick_Z = 3; // Z轴连接到数字引脚D3
void setup() {
pinMode(JoyStick_Z, INPUT);
Serial.begin(9600); // 设置串口波特率为9600
}
void loop() {
int x, y, z;
x = analogRead(JoyStick_X); // 读取X轴的模拟值
y = analogRead(JoyStick_Y); // 读取Y轴的模拟值
z = digitalRead(JoyStick_Z); // 读取Z轴的数字值
Serial.print("X: ");
Serial.print(x);
Serial.print(" Y: ");
Serial.print(y);
Serial.print(" Z: ");
Serial.println(z);
delay(1000); // 延迟1秒
}
上传代码到 Arduino 开发板:
将 Arduino 开发板通过 USB 连接到计算机。
在 Arduino IDE 中选择正确的开发板和端口。
点击上传按钮将代码上传到 Arduino 开发板。
测试
打开串口监视器:
在 Arduino IDE 中点击串口监视器按钮。设置波特率为 9600Hz。摇动摇杆,你将在串口监视器中看到 X 轴、Y 轴和 Z 轴的值。
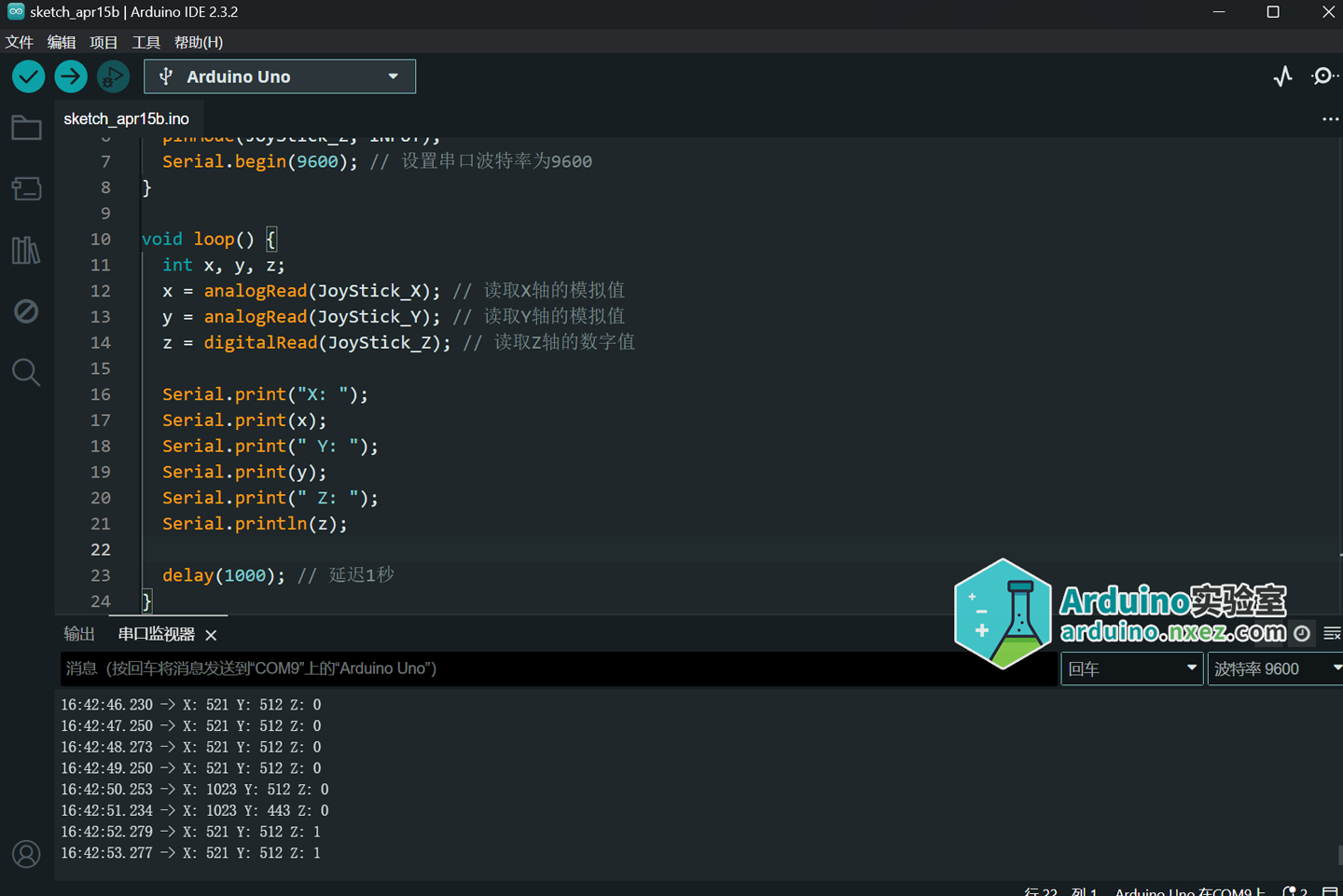
这样,你就成功地使用 Arduino 控制摇杆了!
注意事项:确保正确连接摇杆模块到 Arduino 开发板。在代码中,你可以根据需要修改引脚号和波特率。
你还可以:
查看系列教程中的其他文章
购买本教程所用到的 Pico 套件


发表评论
要发表评论,您必须先登录。