概述
演示直流电机的控制。
示例程序
PWM控制直流电机
略过控制电机转停的示例啦,有需要就把这里的 PWM 换成数字口输出 HIGH 或 LOW 就行了。
// ----------------------------------------------------------------------------
// pwmMotor.ino
//
// Created 2015-06-11
// By seesea <seesea2517#gmail#com>
//
// PWM 控制直流电机转速
// 其实就是之前的 PWM 控制 LED 的程序,完全一样,只是硬件上加上一个三极管用来驱动电机而已
//
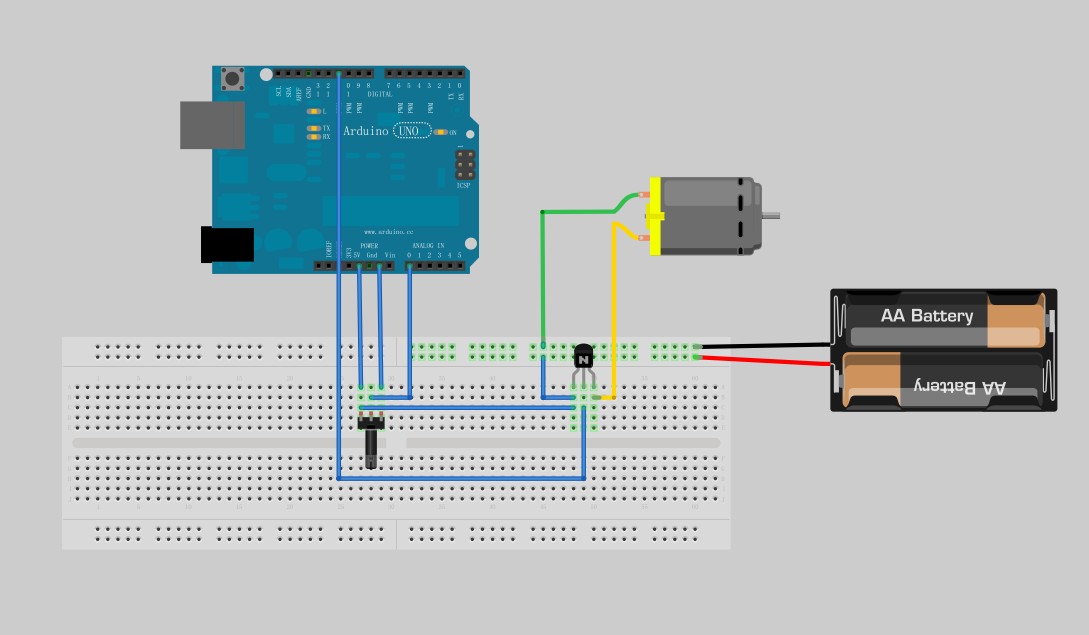
// 11 脚接 NPN 三极管的基极,三极管集电极接电机一脚,电机另一脚接外接电源正极,三极管发射极接外接电源负,arduino 的 GND 也接到三极管发射极
// ----------------------------------------------------------------------------
const unsigned char motor = 11;
const unsigned char sensor = A0;
void setup()
{
pinMode(motor, OUTPUT);
pinMode(sensor, INPUT);
}
void loop()
{
// 用 map 函数进行范围的映射
analogWrite(motor, map(analogRead(sensor), 0, 1023, 0, 255));
}
上个接线图和效果图:
H桥控制直流电机
// ----------------------------------------------------------------------------
// hBridgeMotor.ino
//
// Created 2015-06-11
// By seesea <seesea2517#gmail#com>
//
// H 桥控制直流电机演示
// 通过 H 桥控制直流电机的转动方向
// 先顺时针转一秒,再逆时针转一秒,停一秒,重复前述动作
//
// 根据 H 桥实际的电路进行接线。手头没有现成的芯片,用了四个三极管搭的粗糙的 H 桥原型来做的实验
// ----------------------------------------------------------------------------
const unsigned char pinMotorCW = 10; // 接控制电机顺时针转的 H 桥引脚
const unsigned char pinMotorCCW = 11; // 接控制电机逆时针转的 H 桥引脚
// 电机停转
void motorStop()
{
digitalWrite(pinMotorCW, LOW);
digitalWrite(pinMotorCCW, LOW);
}
// 电机顺时针转
void motorCW()
{
digitalWrite(pinMotorCW, HIGH);
digitalWrite(pinMotorCCW, LOW);
}
// 电机逆时针转
void motorCCW()
{
digitalWrite(pinMotorCW, LOW);
digitalWrite(pinMotorCCW, HIGH);
}
void setup()
{
pinMode(pinMotorCW, OUTPUT);
pinMode(pinMotorCCW, OUTPUT);
}
void loop()
{
motorCW();
delay(1000);
motorCCW();
delay(1000);
motorStop();
delay(1000);
}
手工搭的 H 桥,太乱了就看个效果吧,建议直接用现成的芯片。
PWM + H 桥控制直流电机
同时控制直流电机的方向及转速
// ----------------------------------------------------------------------------
// pwmHBridgeMotor.ino
//
// Created 2015-06-11
// By seesea <seesea2517#gmail#com>
//
// PWM 通过 H 桥控制直流电机
// 既控制电机的转速,也控制电机的方向
// 控制电机顺时针逐渐转快,再逐渐转慢,然后逆时针由慢转快再转慢,又回到顺时针的转动循环
//
// 根据 H 桥实际的电路进行接线。手头没有现成的芯片,用了四个三极管搭的粗糙的 H 桥原型来做的实验
// ----------------------------------------------------------------------------
const unsigned char pinMotorCW = 10; // 接控制电机顺时针转的 H 桥引脚
const unsigned char pinMotorCCW = 11; // 接控制电机逆时针转的 H 桥引脚
// 电机停转
void motorStop()
{
digitalWrite(pinMotorCW, LOW);
digitalWrite(pinMotorCCW, LOW);
}
// 电机以参数设定的 pwm 值顺时针转
void motorCW(unsigned char pwm)
{
analogWrite(pinMotorCW, pwm);
digitalWrite(pinMotorCCW, LOW);
}
// 电机以参数设定的 pwm 值逆时针转
void motorCCW(unsigned char pwm)
{
digitalWrite(pinMotorCW, LOW);
analogWrite(pinMotorCCW, pwm);
}
void setup()
{
pinMode(pinMotorCW, OUTPUT);
pinMode(pinMotorCCW, OUTPUT);
}
void loop()
{
unsigned char i;
// 顺时针由慢到快
for (i = 0; i < 255; ++i) { motorCW(i); delay(10); } // 顺时针由快到慢 for (i = 255; i > 0; --i)
{
motorCW(i);
delay(10);
}
// 逆时针由慢到快
for (i = 0; i < 255; ++i) { motorCCW(i); delay(10); } // 逆时针由快到慢 for (i = 255; i > 0; --i)
{
motorCCW(i);
delay(10);
}
}
用三极管搭的简陋 H 桥就看个效果啦,建议直接用现成的芯片。
https://www.cnblogs.com/starsnow/p/4579547.html

发表评论
要发表评论,您必须先登录。